I²C (“Inter-integrated circuit”, which as a trademark of Phillips is more generically implemented by other vendors as “Two Wire Interface” or TWI) is a synchronous serial interface that is often used to connect peripheral devices (think EEPROMs, gyroscopes, accelerometers, wheel encoders etc) to microcontrollers. Electrically, it requires only two “wires” between each device, a clock line (SCL) and a data line (SDA) and these lines can be shared as a common bus between multiple devices, allowing for a multi-master and multi-slave environment. Each slave on the bus has a unique address within a 7-bit address space.
Both the ATmega32U4 (the microcontroller included on the Romi 32U4 control board) and the Raspberry Pi (as functionality included in its Broadcom BCM2835 (or later) SOC), include hardware allowing them to function as either I²C master or slave. This presents an opportunity to allow simple communication between the two. But why would this be useful and how should we choose who gets to be master and who is a slave?
As an 8-bit microcontroller with 32kbyte program memory the ATmega32U4 is clearly limited in its capabilities. There is no room or compute power for more advanced functionality, such as computer vision, that we want oroboto to be capable of. However, if we couple it with a more powerful system, such as the Raspberry Pi, a whole new set of opportunities open up: CV, communication over WiFi, co-operative robotics. The Romi 32U4 control board that the newer iterations of oroboto are using has a female 40-pin header with pinout and mounting holes that are compatible with the Raspberry Pi HAT (Hardware Attached on Top) specification. It directly connects the ATmega32U4’s SDA and SCL lines to those of the Raspberry Pi (which actually has multiple I²C buses) and also routes power from the Romi’s 6x AA batteries to the Pi. You simply have to slot the Pi onto the top of the control board and you now have a powerful robotics platform: the ATmega32U4 can take care of low level functionality like motor control and anything that is timing sensitive, such as reading wheel encoders, and higher level logic, such as navigation strategy and communication can be offloaded to the Pi. Even when adding extra hardware, such as the Raspberry Pi camera, I can power the whole lot for around 45 minutes on the 6x AA batteries.
Having the Raspberry Pi powered up and running alone obviously isn’t sufficient for an integrated system: it needs to be able to communicate with the Arduino via I²C. However, getting this working can have its complications. There is a known bug in Broadcom Serial Controller (BSC) of the Broadcom BCM2835 SOC (the chip that contains the Raspberry Pi’s CPU, RAM, video and other peripherals such as I²C) that corrupts data when I²C slaves (such as the Arduino) implement a technique known as clock stretching to slow down communication on the bus. It would seem that the hardware TWI (I²C) module in AVR microcontrollers does stretch the clock when the AVR is a slave and this has and is causing trouble for people trying to connect it to a Raspberry Pi because of the Broadcom bug. I should note that I haven’t been able to directly verify whether the Broadcom issue exists in later versions of the BCM283x as used in Raspberry Pi 2 and 3 models.
To work around these issues, the Romi team have created an alternative to the standard Arduino Wire.h I²C library: the PololuRPISlave library which configures the Arduino as an I²C slave and adds timing hacks at the right places to allow successfully communication with a Raspberry Pi master at relatively high speeds. Phew, saved! But… no, oroboto of course has to be more complicated than that.
As previously mentioned, the Romi control board includes the LSM6DS33 IMU (which we need for a gyroscope) and for a while I was also experimenting with a 3-axis magnetometer, the QMC5883L: the readings from both of these units require the Arduino to operate as an I²C master and the sensors as I²C slaves. The pre-canned libraries (which I wasn’t inclined to reimplement) for the LSM6DS33 and QMC5883L configure the Arduino as an I²C master and PololuRPISlave configures it as a slave. Using them together doesn’t work out of the box. While it does seem to be possible to run the Arduino as a mixed master / slave it was a level of fiddling and patching existing libraries I wanted to avoid if possible. The solution I arrived at was counter intuitive from the perspective of “big is master, little is slave” but works: the Arduino remains the single master on the I²C bus and I configure the Raspberry Pi as an I²C slave (even though in the long run it’s the “command module” of the overall integrated system).
The pigpio package (and its Python bindings) expose the bsc_i2c() function that allow the Pi to operate as an I²C slave. After installing pigpio on the Raspberry Pi (it starts a daemon that implements the functionality exposed by its bindings) it’s simple to configure a slave address for the Pi and register for an interrupt when a master attempts to communicate with that address:
import pigpio
pi = None
slave_addr = 0x13
def i2cInterrupt():
global pi
global slave_addr
status, bytes_read, data = pi.bsc_i2c(slave_addr)
if bytes_read:
doYourThing(data)
pi = pigpio.pi()
int_handler = pi.event_callback(pigpio.EVENT_BSC, i2cInterrupt)
pi.bsc_i2c(slave_addr)
Later posts will go into more detail, but the code that runs on oroboto’s Raspberry Pi essentially:
- Sets up a UDP server listening for data from botLab (the companion macOS application to send commands and receive telemetry from oroboto)
- Sets up the Raspberry Pi as an I²C slave
- Is periodically polled by the Arduino (acting as I²C master) to see whether any new commands have arrived from botLab (ie. “navigate to waypoint x,y”)
- If a command has been received, sends the command payload back to the Arduino for execution
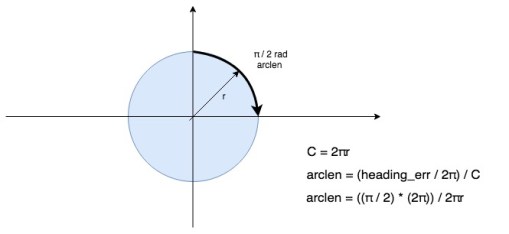
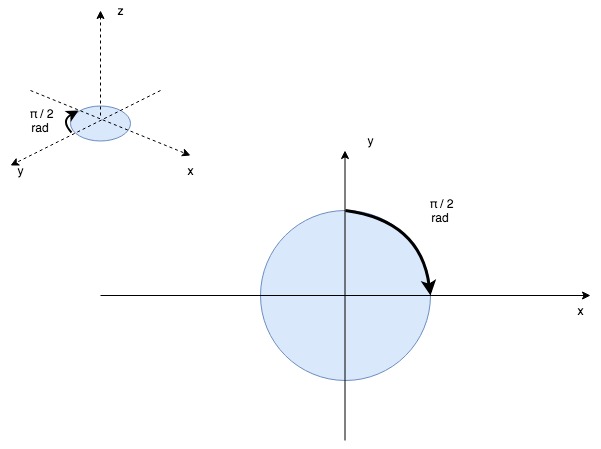
 A differential drive robot’s two wheels are placed horizontally adjacent to each other, as if connected by an axle (their “axis”), and their speed is independently controllable. On most (all?) differential drive robots the axis running through the two wheels also runs through the centre of the bot so that any rotation occurs through its centroid in the x-y plane.
A differential drive robot’s two wheels are placed horizontally adjacent to each other, as if connected by an axle (their “axis”), and their speed is independently controllable. On most (all?) differential drive robots the axis running through the two wheels also runs through the centre of the bot so that any rotation occurs through its centroid in the x-y plane.